

无人机桨叶为什么不固定也能飞
速度过快,固定翼无人机载重普遍偏低,如果要带10公斤药量的固定翼无人机,恐怕巡航速度要非常快的速度,对于喷洒效果来说是很难保证的。
电机或桨叶故障如果无人机起飞时只有前面两个桨叶工作,可能是由于其他两个桨叶或相连的电机出现了故障。这可能是由于长时间使用导致的磨损、电机线圈短路、电调故障或者桨叶损坏。桨叶卡住或松动如果桨叶未能正确安装或在使用过程中松动,可能会导致起飞时只有部分桨叶提供升力。
无人机桨叶,由于材质不均,高速旋转,会产生剧烈震动。这样对模型飞机飞行稳定性,大噪音、和桨叶主轴快速磨损。都有很大影响。叶片需要动平衡,达到叶片在高速运转的平衡。可以通过台湾宏富信动平衡仪 测量下。通过几个办法解决:去试重仪器精准告知再第几个叶片或是多少度的地方,去重多少克。
无人机桨叶需要进行动平衡操作。因为桨叶的质量分布不均匀或者制造过程中的误差会导致桨叶的重心偏移,进而导致无人机在飞行时产生震动,影响飞行性能和图像稳定性。所以,需要进行动平衡操作以达到精度要求。
无人机教员证怎么考
首先,你需要满足一些基本条件。这包括年满18周岁、无刑事犯罪记录、具备高中或以上文化程度。此外,你还需要持有相应级别的无人机驾驶员证书,并具备与申请教员等级执照相同类别分类等级的超视距等级驾驶员执照。
首先,必须获得机长证,这是进入教员证考试的前提条件。机长证获得后,飞行时间需达到规定的时长,才能有资格申请教员证。需要注意的是,无人机种类繁多,包括固定翼、多旋翼和直升机。
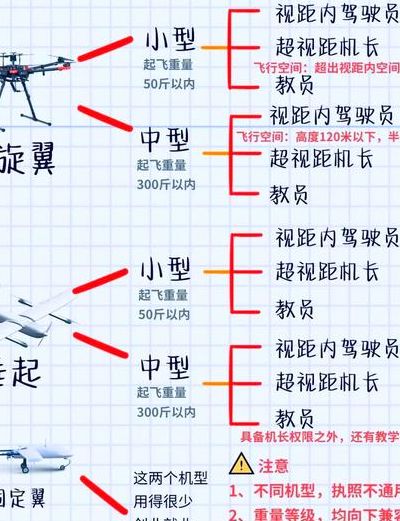
首先要考取相应类型的超视距驾驶员(机长证),并且有一定的飞行时间。例如,要考取多旋翼教员证,就要有多旋翼超视距驾驶员,并且飞行时间不少于100小时。具备条件后,可以向有资质的培训机构报名参加无人机教员培训。培训内容包括理论知识和实践技能两部分。
为了获取无人机教员证,考生需首先完成报名程序。这可以通过两种途径进行:访问当地公安局的官方网站或通过无人机培训机构的官方渠道。在报名成功之后,考生将被要求参加由民航局指定的培训机构提供的无人机驾驶员培训课程。这些课程旨在教授飞行理论知识和实践操作技能,为考生提供必要的知识和技能基础。
飞行安全等相关知识。其次,要进行充分的实践飞行训练,掌握自旋+八字飞行动作。最后,要通过模拟口试,提高应变能力和专业知识掌握情况。整个考试过程可能会有一定的挑战,但只要考生认真准备,积极应对,相信都能顺利通过。获得CAAC教员证后,不仅能够提升自身的专业素养,还能为无人机飞行教育事业贡献力量。
要考取无人机教练证,首先需要满足一定的条件,并通过一系列的考试。报考条件包括:年满18周岁、具备初中以上文化程度、矫正视力0以上、无色盲色弱、无传染性疾病等。此外,还必须已经取得超视距驾驶员执照,并有100小时以上的飞行时间记录。考试内容主要分为理论考试、综合问答、实践飞行和口试四个部分。
无人机是怎么样转弯的?
一般情况下,内八解锁,也就是两个摇杆同时向内下侧打到最底此时电机进入怠速。
转弯时,起着支配地位的主要是飞机的坡度。坡度形成,飞机即进入转弯;改平坡度,转弯即停止、在一定条件下的转弯中,坡度增大,机头会下俯,速度随机增大;坡度减小,则相反。因此,转弯的注意力主要应该放在保持坡度上,这是做好转弯的关键。
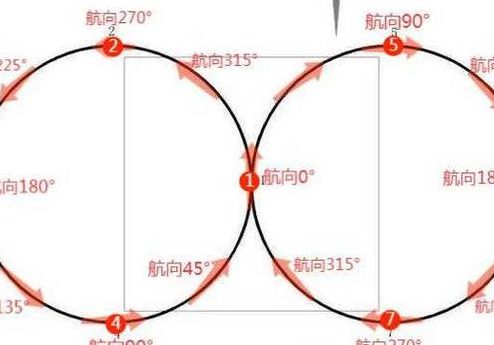
无人机四转弯是什么意思?准确的说,那叫飞五边,只在起降的时候才有。起飞,沿着跑道方向飞,这是一边。
方向舵。无人机升空后,使用方向舵进行转弯,不用或尽量少用副翼转弯,在水平方向上,顺时针/逆时针完成一个8字航线。副翼的作用是控制飞机的滚转,一侧的副翼向上,减少升力或产生负升力,另一侧的副翼向下,增加升力,这样飞机两侧升力不一样,就向一侧滚转。
无人机怎么转弯?无人机在飞行的时候需要转转弯,这时候就要在你的油门杆子上操作了,油门杆左右移动就是让它左右拐弯儿的。可是在飞行的情况下尽量不要进行急转弯。因为急转弯的话速度会骤降。这个就主要看你的技术水平了。如果嗯。急转弯容易掉下来哦。
操控无人机时,内八解锁是常用的操作方式。具体操作是,将两个摇杆同时向内下侧打至最低位置,此时电机将进入怠速状态。左边摇杆的上下移动用于控制飞机的高度,而左右移动则负责飞机的左右转弯。右边摇杆的功能与左边有所不同,其上下移动控制飞机的前进和后退,而左右移动则使飞机进行左侧飞或右侧飞。
【【【航模与无人机】】】
航模和无人机的区别主要体现在定义、飞控系统、自动控制、组成、用途和管理等方面。下面详细解析这些区别: 定义区别:- 航模是指一种有尺寸限制、带有或不带有动力装置、不能载人的航空器,通常要求在视距内飞行,视距距离不超过500米,相对高度不超过120米。
无人机与航模在定义上有显著差异,无人机是通过无线电遥控设备或自身程序控制进行飞行的无人驾驶飞行载具,无需驾驶员在机内驾驶。相比之下,航模是一种有尺寸限制的可遥控的不能载人航空器,通常分为自由飞类、线操纵类和无线电遥控类。
无人机与航模,两者看似相似,实则有着本质区别。首先,无人机设计目标更侧重于实际应用。它们具有较高的飞行效率,可长时间执行任务,如侦察、监视、货物运输等。相比之下,航模更侧重于娱乐与教育功能。它们在设计上更多考虑操控体验、飞行稳定性以及外观美观等,用于个人娱乐和青少年科技教育。
定义区别 航模的定义是一种重于空气的,有尺寸限制的,带有或不带有动力装置的,不能载人的航空器,要求在视距内飞行,视距距离一般不超过500米,相对高度不超过120米。
无人机的飞控系统复杂,依赖中央控制,允许程序化的操作,如自动返航和超视距飞行。而航模则主要依赖遥控操作,通常在操控员视线范围内。在安全管理上,我国对无人机和航模的管理权限划分并不清晰,美国FAA则有明确的模型飞机与无人机区分标准,如娱乐性、视线内飞行和特定的通知要求。
无人机与航模存在多方面区别。定义与用途方面:无人机是利用无线电遥控设备和自备程序控制装置操纵的不载人飞机,广泛用于航拍测绘、农业植保、物流配送等领域;航模则是一种航空模型,主要用于航空知识普及、科技体育运动以及个人兴趣爱好展示等。
60年代的老式无人机靠什么控制它远距离飞行的?
年代的无人机飞行原理类似于巡航导弹,主要依赖惯性制导系统进行远程控制。首先,地面操作人员会详细规划无人机的飞行路线。例如,设定无人机发射后飞行100公里,之后进行第一次转弯,转弯半径为5000米,然后继续飞向下一个转弯点。这些转弯点和飞行路线都是事先设定好的。
WIFI WIFI技术成熟,便于通过无线WIFI传输视频或图像。然而,其传输距离较短,需要大功率中继设备以实现远距离控制,因此更适合短距离应用。 4G 4G技术通过移动运营商的众多基站,实现低延迟的图像传输和超视距控制。
步骤飞控系统控制无人机向最近的充电基站飞行,并控制无人机与该充电基站的垂直高度在 h ~ H 米范围内,然后控制摄像机拍摄该充电基站,并将拍摄的图像传送给无人机控制系统。
")
")
")
")



