

无人驾驶惯性传感器
1、惯性定位 基于视觉或激光的地图信息匹配定位 通过摄像头或激光雷达的地图信息匹配方法也是一种绝对位姿估计方法。该方法通过事先建立地图信息,在无人驾驶过程中,不断将检测到的数据特征与地图信息进行对比匹配,从而得到车辆在地图中的绝对位姿。
2、在无人驾驶技术中,理解地理信息系统中的八大坐标系至关重要。这些坐标系包括:ECI地心惯性坐标系:以地球中心为原点,固定不变,是惯性传感器测量加速度和角速度的基准。ECEF地心地固坐标系(E系),也随着地球自转,如WGS84坐标系,常用于导航,但与地图不匹配。
3、IMU是一个用于测量物体在三维空间中的运动状态的装置。它通常包含三个陀螺仪和三个加速度计,分别用于测量物体在三个轴上的角速度和加速度。通过这些数据,可以进一步计算物体的姿态和位置。应用领域 IMU广泛应用于航空航天、无人驾驶车辆、机器人、智能手机等领域。
4、无人机飞控系统由陀螺仪(角速度计)、PID控制、惯性测量单元、卫星定位系统等组成。陀螺仪(角速度计):基于角动量守恒的理论,用高速回转体的动量矩敏感壳体相对惯性空间绕正交于自转轴的一个或二个轴的角运动检测装置。
5、无人驾驶汽车需在一辆汽车上360度均需覆盖无人车传感器。无人驾驶目前主要采用摄像头、毫米波雷达、超声波雷达、激光雷达等几类传感器。无人驾驶系统的核心可以概述为三个部分:感知,决策和控制。感知是指无人驾驶系统从环境中收集信息并从中提取相关知识的能力。
6、惯性导航广泛应用于航空、航天、航海、汽车以及移动设备的定位与导航。例如,在飞机飞行过程中,惯性导航系统可以提供高精度的位置、速度和姿态信息,确保飞行安全。在无人驾驶汽车领域,惯性导航与其他传感器相结合,实现车辆的自主定位和导航。
汽车启动电路原理图
汽车起动机电路的工作原理:当点火开关闭合时,使得两个线圈绕组(保持线圈S-地和吸拉线圈S-M)通电。值得注意的是,由于吸拉线圈的电阻很小,通过它的电流很大。这个线圈是与电动机电路串联的,在电流的作用下,电动机会缓慢旋转,以方便小齿轮和飞轮接合。
汽车点火器的工作原理:下面将描述磁感应信号发生器和简化点火器电路的基本工作原理。简化的电路如图5-32所示。(1)停机保护状态:如图5-33所示,当点火开关刚打开,发动机未启动时,信号发生器没有信号电压,电池电压经R1和R2分压后作用于P点,P点电压通过信号线圈作用于三极管的基极。
起动机的作用是通过直流电动机产生动力,经传动机构带动发动机曲轴转动,实现发动机的起动。起动机由直流电动机、传动机构和控制装置三大部分组成,如图3一25所示。图3一26a、b所示为电磁操纵强制啮合式起动机的工作原理。当接通起动开关时,起动继电器线圈电路接通,触点吸闭。
电瓶:电瓶的负极接地,也就是说将电瓶的负极接在临近的钣金上。正极用25平方的绝缘纯铜线一头和正极连接,另一头和电闸的一个接线柱连接,电闸的另一个接线柱用25平方的绝缘纯铜线和【启动机上的磁力开关】剩余的那个接线柱连接,在这个接线柱上再接一根2平方的带皮铜线和电流表负极连接。
电磁开关工作原理 当吸引线圈和保持线圈通电产生的磁通方向相同时,其电磁吸力相互叠加,可以吸引活动铁心向前移动,直到推杆前端的触盘将电动开关触点接通势电动机主电路接通为止。
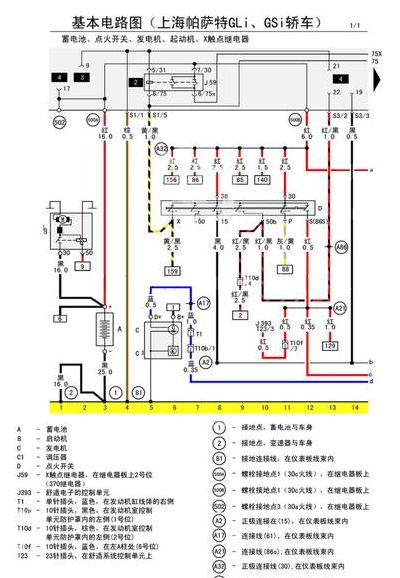
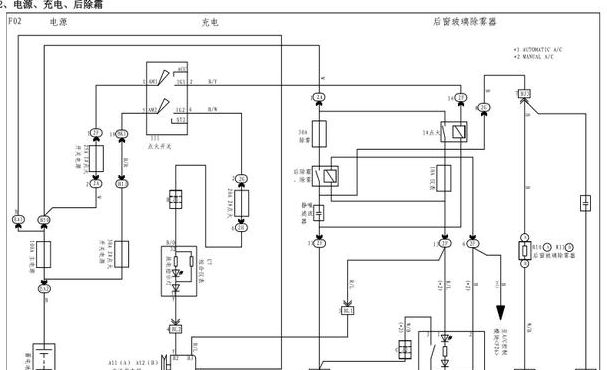
汽车电路图之汽车电路原理图
电流方向基本从上到下,路径为电源正极“”开关电器搭铁电源负极“-”。各局部电路(或子系统)相互并联且关系清晰,发电机与电池、各子系统之间的连接点尽量保持在原位,熔断器、开关及仪表等连接方法基本与原图一致。
本地电路原理图:为了了解汽车电器的内部结构、元器件之间的关系以及一个局部电路的工作原理,往往需要从整车电路图中抽出一个需要研究的局部电路,参考其他详细资料,必要时根据现场勘测、检查和试验记录,对关键部位进行放大、绘制和说明。
检查发电机输出接线,找到B+,F,N,E,它们分别为正电极B+(最粗),励磁端F(细线),中性端N,第3端(本图未接线),地E(右侧接外壳)。发电机内有三相绕组和励磁绕组,整流电路,充电部分接线如下图:电瓶负极与发电机E都搭铁,电流表可不接,电子调节器向外提供稳定电压。
")
")
")
")



